在当今汽车电子架构日益复杂的背景下,车载网络通信技术扮演着神经系统的关键角色。其中,控制器局域网(Controller Area Network, CAN)总线技术自诞生以来,历经数十年发展,已成为汽车内部电子控制单元(ECU)之间通信的绝对主流和基石。本文旨在系统性地解析汽车级CAN总线通信技术的核心原理、协议架构、性能特点及其在现代智能汽车中的演进与挑战。
一、 CAN总线技术概述:诞生与核心理念
CAN总线由德国博世公司于1980年代为解决汽车中日益增多的ECU之间的通信问题而开发。其核心理念是构建一个多主、广播式、事件驱动的串行通信网络。与传统的点对点布线相比,CAN总线通过一对双绞线将所有节点并联,极大地简化了线束,降低了成本、重量和复杂度,同时提高了系统的可靠性与可扩展性。
二、 核心技术原理深度解析
- 物理层与电气特性:
- 总线介质:通常采用屏蔽或非屏蔽双绞线,具有出色的抗电磁干扰能力。
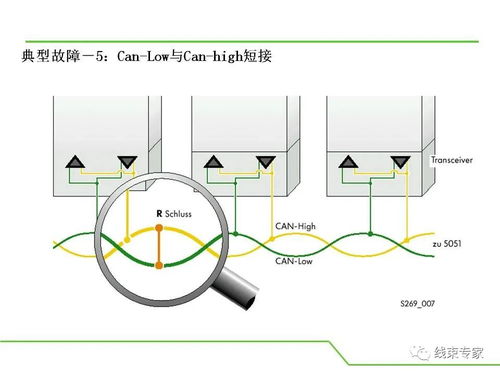
- 信号表示:采用“差分信号”传输。总线上的逻辑状态通过CANH和CANL两条线之间的电压差来定义(如显性电平“0”电压差约2V,隐性电平“1”电压差约0V)。这种设计对共模干扰有极强的抑制能力。
- 终端电阻:总线两端必须各接一个120欧姆的终端电阻,用于阻抗匹配,消除信号反射,保证信号完整性。
- 数据链路层:协议的精髓
- 报文(帧)结构:CAN通信的基本单位是“帧”。关键帧类型包括:
- 数据帧:用于节点发送数据,包含仲裁场、控制场、数据场(最多8字节)、CRC校验场等。
- 远程帧:用于请求发送具有相同标识符的数据帧。
- 错误帧与过载帧:用于错误处理和流量控制。
- 非破坏性逐位仲裁:这是CAN总线实现多主竞争的核心机制。当多个节点同时发送时,它们从报文标识符(ID)的最高位开始逐位比对。发送显性位(0)的节点将覆盖隐性位(1)。ID数值越小(二进制表示前导0越多),优先级越高。竞争中失利的节点会自动转为接收模式,稍后重试,没有任何数据损坏或时间损失。
- 可靠的错误检测与处理:CAN协议设计了包括CRC校验、位填充、帧格式检查、应答错误在内的多层错误检测机制。每个节点都具备错误计数器,可根据错误严重程度进入“错误主动”、“错误被动”或“总线关闭”状态,确保单个节点的故障不会导致整个网络瘫痪,体现了极高的鲁棒性。
三、 汽车级CAN的特殊要求与分类
“汽车级”意味着需要满足严苛的车规标准(如AEC-Q100, ISO 16750等),具备:
- 宽工作温度范围(如-40°C 至 125°C)。
- 极高的抗电磁干扰(EMI)和电磁兼容性(EMC)。
- 长期的可靠性与稳定性。
在汽车中,根据实时性和带宽需求,CAN网络通常分为两类:
- 高速CAN:速率最高可达1 Mbps,常用于对实时性要求高的动力总成系统(发动机、变速箱控制)、底盘控制(ABS、ESP)等。
- 低速/容错CAN:速率通常在125 Kbps以下,具有更强的故障容错能力(如单线工作模式),常用于车身舒适系统(门窗、灯光、空调等)。
四、 经典CAN与CAN FD:演进与增强
随着汽车功能增加,传统CAN(经典CAN)最大8字节数据场和1Mbps的带宽已显不足。为此,博世推出了CAN FD(Flexible Data-Rate)。
- 核心增强:
- 可变速率:在仲裁阶段使用标准波特率,在数据阶段切换至更高的波特率(最高可达5Mbps甚至更高)。
- 扩展数据场:数据场长度从8字节扩展至最多64字节,显著提高了单帧数据的传输效率,减少了协议开销。
- 更优的CRC校验:采用更长的多项式,提升高速传输下的错误检测能力。
- 应用:CAN FD正逐步在对带宽有更高需求的域控制器间通信、高级驾驶辅助系统(ADAS)、车载诊断(OBD)等领域替代经典CAN。
五、 在现代汽车电子架构中的位置与挑战
在面向“软件定义汽车”的集中式域控或中央计算架构中,CAN总线并未被淘汰,而是找到了新的定位:
- 作为子网:在区域控制器或域控制器内部,CAN仍是连接大量传感器、执行器和低复杂度ECU的高性价比、高可靠性选择。
- 与以太网共存:车载以太网凭借超高带宽(百兆/千兆)成为骨干网首选,负责域间高速通信。而CAN则作为其有效补充,在实时控制、可靠性和成本敏感的局部网络中继续发挥不可替代的作用,二者通过网关进行协议转换与信息路由。
六、
汽车级CAN总线技术以其卓越的实时性、惊人的可靠性和极高的性价比,奠定了现代汽车电子网络的基石。从经典CAN到CAN FD的演进,展现了其强大的生命力。尽管面临更高带宽需求的挑战,但在可预见的CAN及其演进技术仍将与新兴的以太网等技术深度融合,共同构建更智能、更安全、更复杂的汽车神经网络,继续驱动汽车工业的革新。理解CAN,是理解汽车电子通信不可或缺的一课。